The Underwater Positioning System (UPS) is designed to determine the position of a vessel operating at a dedicated testing ground or an Underwater Object (UO) fitted with a Mobile Responder Beacon (MRB)
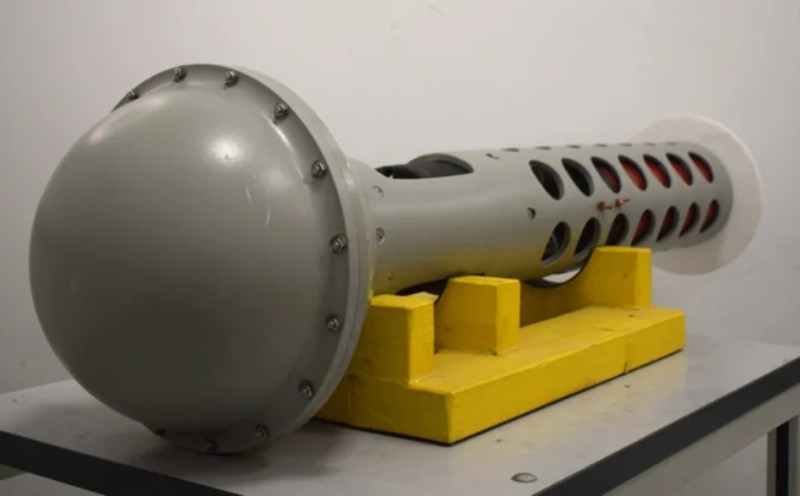
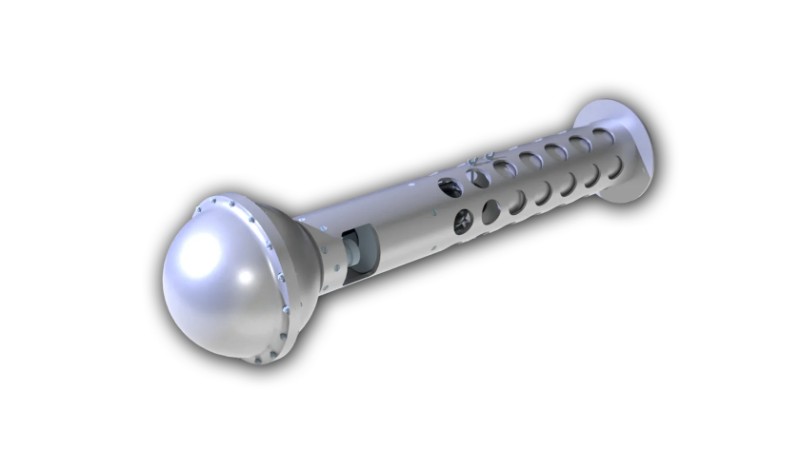
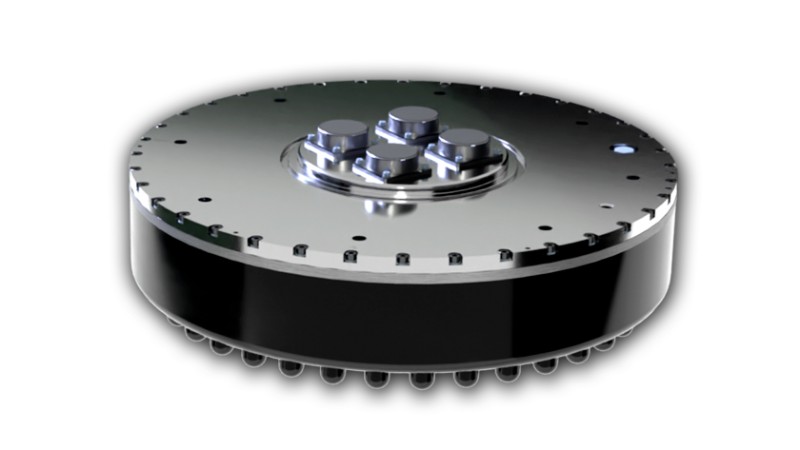
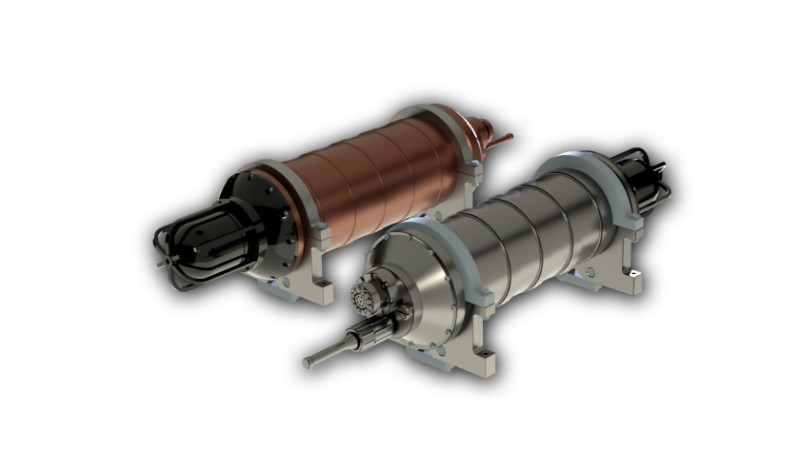
Device appearance
Stationary Bottom Responder Beacon
Мобильный маяк - ответчик
Objectives
Locating and tracking of underwater object position using the Ultra-Short Baseline (USBL) method
Locating and tracking of underwater object position within a dedicated testing ground using the Long Baseline (LBL) method
Locating and tracking of vessel position within at a dedicated testing ground using the LBL method
System structure
Shipborne components
acoustic antenna, retractable deployment system, equipment cabinets with transmitting/receiving equipment, operator workstation, and control device (unit 40) for MRB deployment
Object components
MRB (unit 15MMO) in various modifications for installation on underwater objects
Testing range components
Seabed Responder Beacon (SRB, unit 15MI), including pop- up versions for range instrumentation